
Semantic Segmentation of the Liver in Laparoscopic Images with Depth Maps using Artificial Neural Networks
- chair:Optical Technologies in Medicine
- type:Bachelor thesis
- tutor:
- person in charge:
Motivation
Laparoscopic liver surgery is a minimally invasive surgical technique that offers several advantages over traditional open surgery. It involves smaller incisions, resulting in less pain and scarring for the patient. However, laparoscopic surgery is more technically challenging than open surgery and requires highly qualified surgeons. To support the surgeon during the operation we are developing a navigation tool using preoperative data as overlay on the laparoscopic images. For the navigation the detection (segmentation) of the liver in the laparoscopic image is required. However, the segmentation of the liver in the RGB images is not easy to solve since the anatomical structures in the images are similar to each other. Thus, one idea is to use the depth as additional information and perform the detection on 3D reconstructed laparoscopic images (depth maps).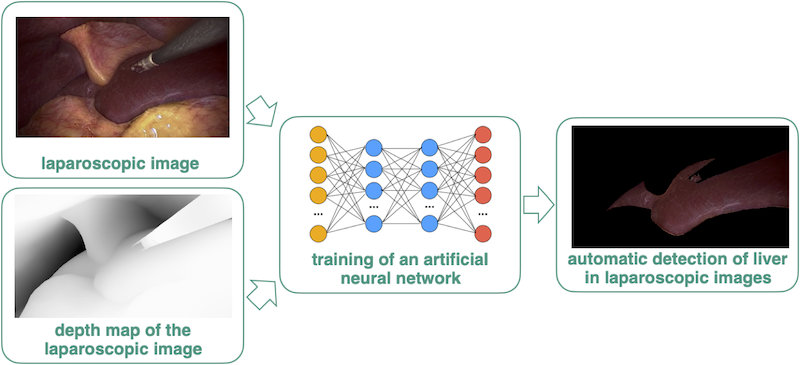
Project Description
The initial phase of the project involves conducting a literature review to gain a thorough understanding of recent developments in deep learning segmentation specifically applied to depth maps. Subsequently, an appropriate approach will be implemented and tailored to our specific use case, which is the detection of the liver in laparoscopic depth maps. The training process will utilise both synthetic and clinical data. Additionally, the effectiveness of the approach will be evaluated on both synthetic and clinical datasets. As an optional step, a comparative analysis with segmentation on 2D RGB images can be conducted.